# TUGAS PROYEK SISTEM PAPAN PENYEIMBANG BOLA MENGGUNAKAN PID
## Nama Kelompok
- Cetta Maulana Andhika (1103213119)
- James Mesakh Prakoso (1103210189)
- Muhammad Faiz Anindyo Widodo (1103213011)
- M Tsani Faishal Azhar (1103210143)
- Muhammad Rayyan Aqiilah Manna (1103210210)
- Muhammad Farrel Ahadi Tama (1103210177)
## Daftar Isi
> [TOC]
> **[CLO 4]** Memiliki kemampuan untuk menganalisis sistem kendali loop tertutup pada kondisi transien dan steady state untuk melihat performansinya.
> **[CLO 5]** Memiliki kemampuan merancang sistem kendali motor DC.
<!--
> **Capaian CLO 4:**
> 1.Mahasiswa mampu menjelaskan konsep kendali umpan balik.
> 2.Mahasiswa mampu merancang sistem kendali PID.
> 3.Mahasiswa mampu mengevaluasi dan optimasi sistem kendali PID.
> **Capaian CLO 5:**
> 1.Mahasiswa mampu mendapatkan fungsi transfer sistem dari mekanisme transfer daya.
> 2.Mampu menjelaskan cara kerja dan karakteristik motor listrik, khususnya motor DC.
> 3.Mampu menganalisis hubungan antara torsi dan kecepatan motor.
> 4.Mahasiswa mampu mendemonstrasikan sistem mekanisme transfer daya sederhana menggunakan gear dan motor DC.
>
-->
## Pendahuluan
Laporan ini dibuat untuk menyelesaikan tugas CLO 4 dan CLO 5 pada mata kuliah Sistem Kendali dan Mekanika. Pada tugas ini, kami memilih untuk membuat projek ball balancing menggunakan sistem kontrol PID. Pada projek ini, kami mengimplementasi kontrol PID untuk menjaga keseimbangan bola dengan cara menyesuaikan sudut kemiringan secara otomatis, untuk meminimalkan error, yaitu jarak antar posisi aktual dan posisi setpoint. Sistem ini dapat digunakan untuk mempelajari dan memahami dasar-dasar kontrol Proportional-Integral-Derivative (PID).
## Rancangan Sistem Kendali Loop Tertutup PID
PID adalah singkatan dari Proporsional, Integral, dan Derivatif, yang merupakan jenis kontrol umpan balik atau feedback yang banyak digunakan dalam otomatisasi dan sistem kontrol. PID digunakan untuk mengendalikan sistem dinamis dengan cara mengukur perbedaan antara nilai yang diinginkan dan nilai yang sebenarnya.
Nilai P, I, dan D memiliki pengaruh masing-masing pada sebuah respon sistem. Dan pada sistem ball balancer kami, P akan menentukan seberapa cepat bola bergerak untuk mengimbangi perubahan posisi. Jika nilai P terlalu kecil, bola mungkin tidak merespons cukup cepat terhadap perubahan posisi, dan jika nilai P terlalu besar, sistem dapat menjadi tidak stabil atau berayun berlebihan. Nilai D akan mengimbangi kecepatan bola dan akan berusaha menghentikan bola tersebut tepat di set point. Dan nilai I akan berkontribusi untuk mengurangi kesalahan tetap dan menjaga bola tetap di posisi yang diinginkan seiring waktu.
Jika kesalahan statis muncul, integral dapat membantu “mengakumulasi” respons untuk mengkompensasi kesalahan tersebut.
Penelitian dimulai dengan menyusun model sistem bola penyeimbang menggunakan styrofoam dan meletakkan pin besi sebagai penyeimbang. Setelah alat hardware sudah terbentuk, kita membuat codingan arduino untuk mengimplementasikan PID ke arduino tersebut. Setelah hardware, software, dan embedded system sudah dibuat dan disatukan, kita sudah dapat melakukan pengetesan ball balancing.

Tentukan sensor dan aktuator dan hubungan-hubungannya
## Mekanik Motor DC
Teori fungsi transfer pada project ball balancer ini adalah menggunakan referensi set point bola yang sudah ditetapkan sebagai input dan sinyal kontrol ke servo yang akan mengatur kemiringan papan dan menggerakkan bola ke posisi set point yang sudah ditentukan.
Mekanisme daya pada Project Ball Balancer ini melibatkan penggunaan motor dan roda gigi servo untuk menggerakkan papan dan menggerakkan bola ke set point. Motor digunakan untuk memberikan daya dan merespons sinyal kendali dari kontrol PID. Jika bola bergerak ke satu arah, motor servo diatur untuk memberikan torsi yang sesuai untuk mengembalikan bola ke posisi keseimbangan.
## Analisis Transient Respon
```
/*PID controller system with Arduino.
* https://srituhobby.com
*/
#include <Servo.h>
Servo servo;
#define trig 2
#define echo 3
#define kp 14
#define ki 0.02
#define kd 20
double priError = 0;
double toError = 0;
void setup() {
pinMode(trig, OUTPUT);
pinMode(echo, INPUT);
servo.attach(5);
Serial.begin(9600);
servo.write(50);
}
void loop() {
PID();
int a = distance();
Serial.println(a);
}
long distance () {
digitalWrite(trig, LOW);
delayMicroseconds(4);
digitalWrite(trig, HIGH);
delayMicroseconds(10);
digitalWrite(trig, LOW);
long t = pulseIn(echo, HIGH);
long cm = t / 29 / 2;
return cm;
}
void PID() {
int dis = distance ();
int setP = 12;
double error = setP - dis;
double Pvalue = error * kp;
double Ivalue = toError * ki;
double Dvalue = (error - priError) * kd;
double PIDvalue = Pvalue + Ivalue + Dvalue;
priError = error;
toError += error;
Serial.println(error);
Serial.print(" ");
Serial.println(PIDvalue);
// Serial.println(PIDvalue);
int Fvalue = (int)PIDvalue;
Fvalue = map(Fvalue, -140, 140, 140, 0);
if (Fvalue < 0) {
Fvalue = 0;
}
if (Fvalue > 140) {
Fvalue = 140;
}
servo.write(Fvalue);
}
```
<!--  -->

Gambar plot
<!--
Panduan Analisis (CLO4)
1 Plot respon transient Kondisi nilai KP, KI, dan KD yang seperti apa yang membuat sistem paling cepat stabil
2 Plot respon transient Kondisi nilai KP, KI, dan KD yang seperti apa yang membuat sistem memiliki error paling besar
3 Bandingkan set point dengan output hitung berapa besar steady state error (SSE)
4 Mana yang paling rentan menyebabkan sistem berosilasi?
5 (Catatan: dikatakan berosilasi jika berulang kali bolak-balik melewati set point untuk mencapai set point yang diinginkan sampai berada di titik stabil.
6 Bagaimana respons transien sistem tersebut dari masing-masing kategori kecepatan yang diberikan? Hitung dengan menggunakan stopwatch dan berikan penjelasan dari masing-masing waktu berikut ini:
1.Delay time (Td)
2.Rise time (Tr)
3.Peak time (Tp)
4.Settling time (Ts)
-->
Pengukuran ulang setelah dilakukan tuning PID
<!--  -->

Dapat dilihat dari hasil percobaan bahwa sistem paling stabil pada saat nilai :
1. KP = 15
2. KI = 0,02
3. KD = 20
Sedangkan sistem memiliki nilai error paling besar pada saat semua nilai KP, KI, dan KD bernilai 0 pada saat belum dilakukan tuning. Pada saat sistem stablil, Besar Steady State Errornya adalah 0 karena bola tepat berada pada set point yang ditentukan. Yang paling rentan membuat sistem mengalami osilasi adalah KP karena KP yang menentukan kecepatan papan untuk memiringkan bola, sedangkan KD akan mengimbangi kecepatan bola dan akan berusaha menghentikan bola tersebut tepat di set point, dan KI akan berkontribusi untuk mengurangi kesalahan tetap dan menjaga bola tetap di posisi yang diinginkan seiring waktu.
Delay time = 1s
Rise time = 2s
Peak time = 3s
Settling time = 23s
## Analisis Mekanika
<!--
Panduan Analisis Mekanika (CLO 5)
-->
### Pengukuran Mekanik Gear
<!--Ukur pitch diameter (D) dan circular pitch (Pc) setiap gear yang digunakan dengan menggunakan penggaris.
Hitung jumlah gigi dari gear tersebut secara manual, kemudian buktikan dengan menggunakan rumus.
Hitung rasio gear dari dua ukuran berbeda. Jelaskan cara perhitungannya!
Hubungkan kedua gear tersebut dengan kondisi:
1.Posisikan gear yang kecil sebagai driver gear dan gear yang besar sebagai driven gear. Putar driver gear sebanyak 360. Berapa derajat driven gear berputar? kecil/besar * 360
2.Posisikan gear yang besar sebagai driver gear dan gear yang kecil sebagai driven gear. Putar driver gear sebanyak 360. Berapa derajat driven gear berputar? besar/kecil * 360
3.Menurut kelompok Anda, lebih baik gear yang kecil atau besar yang dijadikan sebagai driver gear? Mengapa? ##menurut kelompok kami, gear besar lebih bagus dijadikan sebagai gear driver karena akan menghasilkan torsi yang lebih besar
-->
Kami menggunakan motor servo Tower Pro SG90 untuk melakukan percobaan ini. Servo tersebut memiliki 4 gear berbeda dengan pitch diameter yang sama hyaitu 1 cm dan circular pitch sebesar 0,01 cm. Gear driver memiliki 32 gigi, sementara driven gear memiliki 39, 40, dan 48 gigi. Kami mengambil contoh rasio menggunakan gear driver dengan 32 gigi dan driven gear dengan 48 gigi.
Rasio gear = 32:48 = 2:3
Jika gear kecil dijadikan driver dan diputar sebesar 360 derajat, maka gear besar akan bergerak sebesar 240 derajat. Sebaliknya, jika gear besar dijadikan gear driver dan diputar sebesar 360 derajat, maka gear kecil akan berputar sebesar 540 derajat.
Menurut kelompok kami, gear yang lebih bagus dijadikan gear driver pada percobaan kami adalah gear besar karena kami membutuhkan torsi yang lebih besar. Tetapi tergantung kebutuhan sistem masing-masing, jika sebuah sistem lebih membutuhkan kecepatan daripada torsi, maka gear kecil akan lebih cocok untuk dijadikan driver.
### Analisis Kecepatan Motor terhadap Beban
<!--
Nyalakan motor listrik tanpa beban.
1.Hubungkan beban dengan motor (sesuai kasus project). Apakah motor masih dapat berputar?
2.Tambahkan lagi beban secara bertahap hingga motor berhenti berputar. Lakukan analisis hubungan antara torsi dan kecepatan dari setiap beban yang ditambah hingga motor berhenti berputar.
3.Jika beban terus ditambahkan dan menyebabkan motor berhenti berputar, apakah beban tersebut tetap dapat diputar dengan menggunakan gear? Jelaskan!
4.Bagaimana mengatur komposisi gear agar beban tersebut dapat berputar? Mengapa beban menjadi dapat berputar setelah ditambahkan rangkaian gear?
Jelaskan hal-hal apa saja yang terjadi saat beban motor meningkat, khususnya dilihat dari:
1.kecepatan,
2.CEMF,
3.arus (current),
4.torsi.
-->
Pada saat tidak diberi beban, motor akan tetap bergerak seperti normal. Seiring ditambahnya beban, kecepatan motor akan terus menurun meskipun saat beban ditambah torsi yang diberikan akan meningkat. Saat motor sudah tidak dapat berputar, gear akan dapat membantu motor untuk meningkatkan torsi sehingga motor dapat menggerakkan beban dengan lebih mudah. Sebaiknya komposisi gear diatur menggunakan rasio antar gear yang besar agar torsi yang dihasilkan lebih besar. Karena torsi naik setelah diberi rangkaian gear, maka beban akan dapat diangkat oleh motor.
Kecepatan motor akan semakin menurun saat beban ditambah karena beban akan mengalami gesekan dengan motor sehingga kecepatan motor menurun sampai berhenti. Torsi dan arus akan naik seiring bertambahnya beban karena torsi yang dibutuhkan akan meningkat untuk mengangkat beban tersebut dan arus juga naik karena kebutuhan torsi yang juga naik. Sementara CEMF atau counter electromotive force akan meningkat seiring naiknya beban karena CEMF akan naik dan turun seiring dengan kecepatan motor, dan saat beban ditambah kecepatan motor akan turun sehingga CEMF pun juga ikut naik.
## Hasil dan Saran
[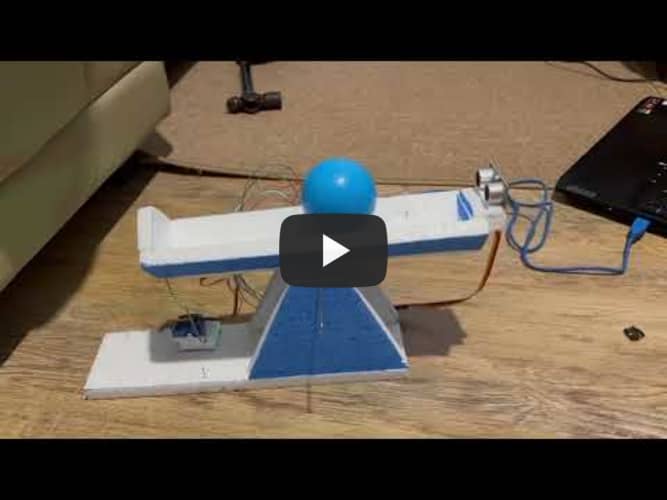](https://youtu.be/NIBzoDG-5YE "")
## Referensi
Wahjudi, Rudy S. “PERANCANGAN SINTEM KENDALI UNTUK BOLA PENYEIMBANG PADA BALOK.” 2019, p. 5, https://e-journal.trisakti.ac.id/index.php/pakar/article/view/4174/3314.
Saputro, J. S., & Latifa, U. (2018, Agustus 08). PERANCANGAN KENDALI KESEIMBANGAN POSISI BOLA MENGGUNAKAN METODE KENDALI PID. 5.
Electronoobs. (2019, Juli 14). PID Balance+Ball | full explanation & tuning. Retrieved Desember 30, 2023, from https://www.youtube.com/watch?v=JFTJ2SS4xyA&ab_channel=Electronoobs
Hobby, S. (2020). What is a PID controller andh how does it work with an Arduino? Retrieved Desember 30, 2023, from https://srituhobby.com/what-is-a-pid-controller-and-how-does-it-work-with-an-arduino/
## Rubrik Penilaian
| Penilaian Indikator Ketercapaian CLO | Bobot |
| -------- | -------- |
| Mahasiswa mampu mengevaluasi dan optimasi sistem kendali PID (soal CLO 4). | 50 % |
|Mahasiswa mampu mendemonstrasikan sistem mekanisme transfer daya sederhana menggunakan gear dan motor DC (soal CLO 5)|50%|
### Kriteria Nilai
| 65-80 | 50-65 | 80-100 | 40-50 | 0-40 |
| ----- | ----- | ------ | ----- | ---- |
| CLO 4 | | | | |
Mampu menjelaskan konsep kendali umpan balik, merancang sistem kendali PID, hingga mengevaluasi dan optimasi sistem kendali PID.| Mampu menjelaskan konsep kendali umpan balik, merancang, dan mengevaluasi sistem kendali PID.|Mampu menjelaskan konsep kendali umpan balik dan merancang sistem kendali PID.|Mampu menjelaskan konsep kendali umpan balik dan PID, tetapi kesulitan dalam merancang dan mengevaluasi sistem kendali PID.| Kesulitan dalam menjelaskan konsep kendali umpan balik dan PID.|
| CLO 5 | | | |
Mampu mendapatkan fungsi transfer sistem dari mekanisme transfer daya, menganalisis hubungan antara torsi dan kecepatan motor, menjelaskan cara kerja dan karakteristik motor listrik, serta mendemonstrasikan sistem mekanisme transfer daya sederhana menggunakan gear dan motor DC.| Mampu mendapatkan fungsi transfer sistem dari mekanisme transfer daya, menganalisis hubungan antara torsi dan kecepatan motor, menjelaskan cara kerja dan karakteristik motor listrik, tetapi kesulitan dalam mendemonstrasikan sistem mekanisme transfer daya sederhana menggunakan gear dan motor DC. |Mampu mendapatkan fungsi transfer sistem dari mekanisme transfer daya, menganalisis hubungan antara torsi dan kecepatan motor, tetapi kesulitan dalam menjelaskan cara kerja dan karakteristik motor listrik. | Mampu mendapatkan fungsi transfer sistem dari mekanisme transfer daya dan menganalisis hubungan antara torsi dan kecepatan motor. |Tidak dapat menentukan satu langkah pun untuk menjelaskan mengenai mekanisme transfer daya.|
 Sign in with Wallet
Sign in with Wallet







