# TUGAS PROYEK SISTEM PAPAN PENYEIMBANG BOLA MENGGUNAKAN PID
Anggota :
- Cetta Maulana Andhika (1103213119)
- James Mesakh Prakoso (1103210189)
- Muhammad Faiz Anindyo Widodo (1103213011)
- M Tsani Faishal Azhar (1103210143)
- Muhammad Rayyan Aqiilah Manna (1103210210)
- Muhammad Farrel Ahadi Tama (1103210177)
**I. Pendahuluan**
Laporan ini dibuat untuk menyelesaikan tugas CLO 4 dan CLO 5 pada mata kuliah Sistem Kendali dan Mekanika. Pada tugas ini, kami memilih untuk membuat projek ball balancing menggunakan sistem kontrol PID. Pada projek ini, kami mengimplementasi kontrol PID untuk menjaga keseimbangan bola dengan cara menyesuaikan sudut kemiringan secara otomatis, untuk meminimalkan error, yaitu jarak antar posisi aktual dan posisi setpoint. Sistem ini dapat digunakan untuk mempelajari dan memahami dasar-dasar kontrol Proportional-Integral-Derivative (PID).
**II. Teori / Metode / Pemodelan**
PID adalah singkatan dari Proporsional, Integral, dan Derivatif, yang merupakan jenis kontrol umpan balik atau feedback yang banyak digunakan dalam otomatisasi dan sistem kontrol. PID digunakan untuk mengendalikan sistem dinamis dengan cara mengukur perbedaan antara nilai yang diinginkan dan nilai yang sebenarnya.<br>
Nilai P, I, dan D memiliki pengaruh masing-masing pada sebuah respon sistem. Dan pada sistem ball balancer kami, P akan menentukan seberapa cepat bola bergerak untuk mengimbangi perubahan posisi. Jika nilai P terlalu kecil, bola mungkin tidak merespons cukup cepat terhadap perubahan posisi, dan jika nilai P terlalu besar, sistem dapat menjadi tidak stabil atau berayun berlebihan. Nilai D akan mengimbangi kecepatan bola dan akan berusaha menghentikan bola tersebut tepat di set point. Dan nilai I akan berkontribusi untuk mengurangi kesalahan tetap dan menjaga bola tetap di posisi yang diinginkan seiring waktu.<br>
Jika kesalahan statis muncul, integral dapat membantu "mengakumulasi" respons untuk mengkompensasi kesalahan tersebut.<br>
Penelitian dimulai dengan menyusun model sistem bola penyeimbang menggunakan styrofoam dan meletakkan pin besi sebagai penyeimbang. Setelah alat hardware sudah terbentuk, kita membuat codingan arduino untuk mengimplementasikan PID ke arduino tersebut. Setelah hardware, software, dan embedded system sudah dibuat dan disatukan, kita sudah dapat melakukan pengetesan ball balancing.

**III. Hasil Pengukuran / Deskripsi Hardware**

Sistem ini menggunakan motor servo untuk mengontrol posisi bola pingpong. Ketika set point ditetapkan, sensor ultrasonik akan memberitahu motor servo bahwa bola akan bergerak ke nilai set point tersebut, dan motor servo berfungsi sebagai aktuator untuk mempertahankan keadaan bola sampai nilai set point tersebut tercapai.
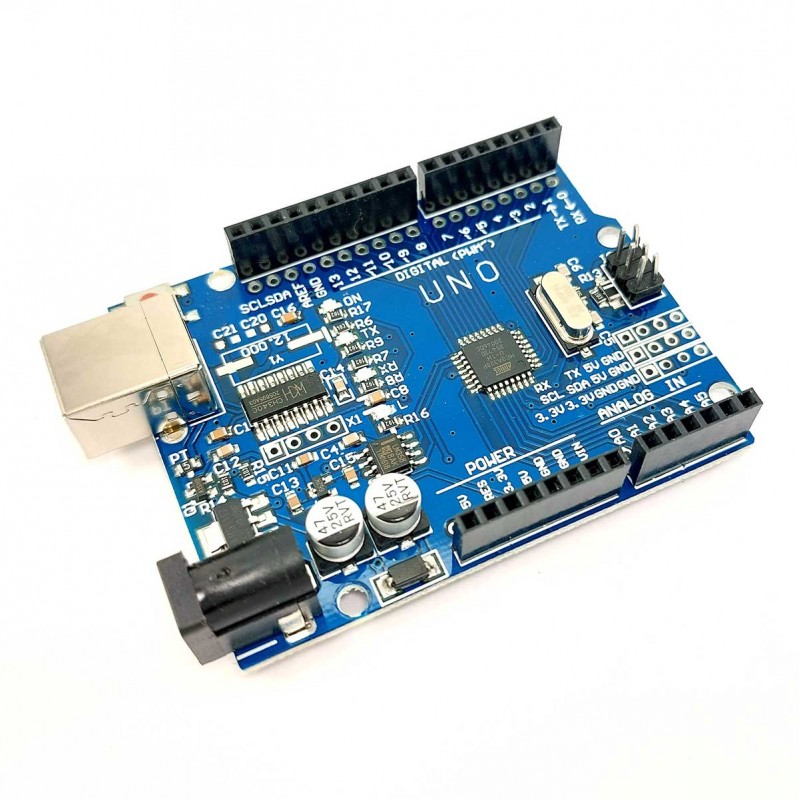
Arduino UNO R3 adalah papan mikrokontroler berbasis ATmega328P. Terdapat 14 pin input/output digital (6 di antaranya dapat digunakan sebagai output PWM), 6 input analog, resonator keramik 16MHz, koneksi USB, colokan listrik, header ICSP, dan tombol reset. Perangkat ini dilengkapi semua i/o yang diperlukan untuk mendukung mikrokontroler, cukup sambungkan ke komputer dengan kabel USB atau nyalakan dengan adaptor AC-DC atau baterai.

Sensor ultrasonik HC-SR04 merupakan sensor siap pakai yang berfungsi sebagai pengirim, penerima dan pengontrol gelombang ultrasonik. Sensor ini bisa digunakan untuk mengukur jarak benda dari 2 cm – 4 m dengan akurasi 3 mm. Sensor ultrasonik memiliki 4 pin, pin Vcc, Gnd, Trigger, dan Echo. Pin Vcc digunakan sebagai listrik positif dan Gnd sebagai ground. Pin Trigger digunakan untuk trigger keluarnya sinyal dari sensor dan pin Echo untuk menangkap sinyal pantul dari benda.

Motor servo adalah motor DC yang memiliki rangkaian kendali dan sistem closed feedback yang terintegrasi di dalamnya. Ketika motor servo berputar, posisi putaran sumbunya dikirim kembali ke rangkaian kendali yang ada di dalamnya.
Grafik Hasil Pengukuran Sebelum Dilakukan Tuning PID
Pada percobaan ini, kami mengatur value p, i, dan d sebesar 0. Sehingga sistem tidak merespon jarak bola terhadap set point.

**IV. Tuning Kontrol / Analisa Kestabilan**
Setelah melakukan tuning PID pada system ball balancer dengan mengatur nilai P menjadi 15, nilai I menjadi 0,02, dan nilai D menjadi 20. Berikut adalah hasil grafiknya :

**V. Hasil dan Saran**
**VI. Referensi**
Wahjudi, Rudy S. “PERANCANGAN SINTEM KENDALI UNTUK BOLA PENYEIMBANG PADA BALOK.” 2019, p. 5, https://e-journal.trisakti.ac.id/index.php/pakar/article/view/4174/3314.
Saputro, J. S., & Latifa, U. (2018, Agustus 08). PERANCANGAN KENDALI KESEIMBANGAN POSISI BOLA MENGGUNAKAN METODE KENDALI PID. 5.
Electronoobs. (2019, Juli 14). PID Balance+Ball | full explanation & tuning. Retrieved Desember 30, 2023, from https://www.youtube.com/watch?v=JFTJ2SS4xyA&ab_channel=Electronoobs
Hobby, S. (2020). What is a PID controller andh how does it work with an Arduino? Retrieved Desember 30, 2023, from https://srituhobby.com/what-is-a-pid-controller-and-how-does-it-work-with-an-arduino/
 Sign in with Wallet
Sign in with Wallet







