How to Build a Task System using Go Docker SDK?
Go is designed to enable developers to rapidly develop scalable and secure web applications. Go ships with an easy to use, secure and performant web server and includes its own web templating library. For enterprises, Go is preferred for providing rapid cross-platform deployment. With its goroutines, native compilation, and the URI-based package namespacing, Go code compiles to a single, small binary—with zero dependencies—making it very fast.
Developers love Go as it performs better because of its concurrency model and CPU scalability. Whenever developers need to process some internal request, they do it with separate Goroutines which are 10x cheaper in resources than Python Threads. Using static linking, Go actually combines all dependency libraries and modules into one single binary file based on OS type and architecture.
Table of Contents
Building the Application
In this blog tutorial, we will learn how to build a basic task system (Gopher) using Go.
First, we’ll create a system in Go that uses Docker to run the tasks. Next, we’ll build a Docker image for the application. The goal here is to give you an example how you can use Docker SDK to build some cool projects. Let’s get started.
Key Components
Getting Started
Once you have Go installed on your system, follow these steps to build a basic task system using Docker SDK.
Here is the directory structure that we will have at the end:
The complete code for the task system is available at dockersample/gopher-task-system.
Define Task
First and foremost we need to define the structure of our task. Our task is going to be a YAML definition which takes the following structure:
The following table describes the task definition:
| Key | Description |
|---|---|
| version | The API version (we are not really using it) |
| tasks | A list of tasks |
| task.name | Name of the task |
| task.runner | The Docker image a task uses to run |
| task.command | A list of string; an argument to the runner |
| task.cleanup | If true, the task container will be removed after completion |
Now that we have a task definition, let's create equivalent Go structs.
Task Runner
The next thing we need is a component that can run the tasks for us. We will call it Runner and here is how we define it:
Note that we are using a done channel (doneCh). It is required because we would like to run our task asynchronously and once the task is complete, we would like it to tell us so.
The complete definition of the task runner can be found here. We would only talk about specific pieces of the code here:
The NewRunner returns an instance of the struct providing the implementation of the Runner interface. The instance will also hold a connection to the Docker engine. This connection is initialized in the initDockerClient function by creating a Docker API client instance from environment variables.
By default it creates an HTTP connection over Unix socket unix:///var/run/docker.sock (the default Docker host). If you would like to change the host, you can do so by setting the DOCKER_HOST environment variable. The FromEnv will read the environment variable and do the needful.
The Run function, as defined below, is fairly simple. It loops over a list of tasks and executes them. It uses a channel named taskDoneCh, to know when a task is done. It's important to check whether or not we have received a done signal from all the tasks, before we return from this function.
The internal run function does the heavy lifting for the runner. It accepts a task and transforms it into a Docker container. It uses a ContainerManager to execute a task in the form of a Docker container.
Container Manager
The container manager is responsible for:
- pulling Docker image for task
- creating the task container
- starting the task container
- waiting for the container to complete
- removing the container, if required
Therefore, with respect to Go, we can define the container manager as:
We have the containerManager which provides the implementation for ContainerManager interface:
Notice that containerManager has a field called cli of type DockerClient interface, which itself embeds two interfaces from the Docker API - ImageAPIClient, and ContainerAPIClient. Why do need that?
For the container manager to perform its operation it needs to act as a client for the Docker engine/API. And the client will work with Images and Containers, it must be of a type that can provide the required APIs. Hence, we need to embed the core Docker API interfaces and create a new one for us.
The initDockerClient function (seen above in runner.go) returns an instance that implements the required interfaces. Hence, everything put together works the magic. You can the documentation here to better understand what is returned when we create a Docker client.
The complete definition of the container manager can be found here.
Note: We have not individually covered all functions of container manager here, otherwise the blog will be too extensive.
Entrypoint
Now that we have the individual components covered, let's put all the pieces together in the main.go which would be our entrypoint:
Here is what we do:
- Validate arguments
- Read the task definition
- Initialize task runner which in turn initializes container manager
- Create a done channel receive the final signal from runner
- Run the tasks
Steps to Run
- Clone the repository
- Build the task system
- Run tasks
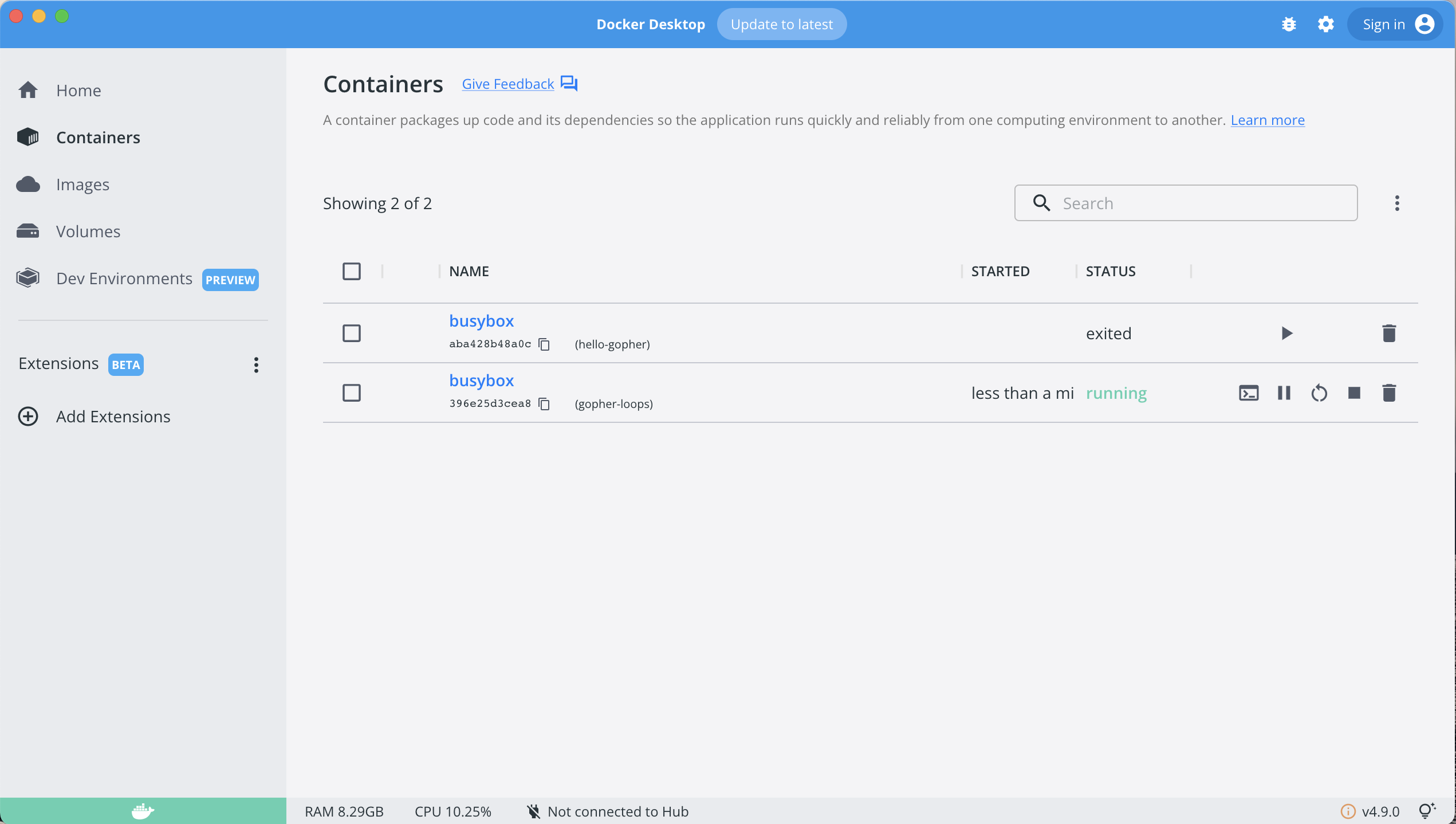
- Run
docker ps -ato see what all task containers
Note that in task.yaml the cleanup flag is set to false for both the tasks. It was done on purpose to get containers list after task completion. Set it to true and the task containers will be removed automatically.
Sequence Diagram
Conclusion
In this blog post, we have built a simple task system using Docker SDK for Go. Docker is mostly used as an Ops platform to run workloads. However, with Docker SDK you can build cool tools of your own which eventually helps you better understand how Docker works under the hood. We look forward to sharing more such examples and cover different things you can do with Docker SDK.
