<style>
.reveal { font-size: 32px; }
.reveal strong { color: #e7ad52; }
.reveal li { padding: 0.5em; }
.reveal img { max-height: 70vh; }
</style>
# Avionics Basic
## **NCKU ISP**
---
## Avionics 航電系統
**航**空**電**子 **Avi**ation electr**onics**
航電 Avionics
---
## Avionics
{%youtube QQt-9SSJ51c%}
----
## Saturn V

---
## Avionics including...
- **Power**: Providing a stable and clean power source.
- **MCU**: Processing data from sensors, Filtering, Navigation.
- **Sensor**: Collecting data (acceleration, altitude, location etc.)
- **Actuator**: Motor, Light, Speaker.
- **Communication**: Connect the vehicle to the ground station.
<!--
----
## Avionics used by ISP

-->
----
## **Avionics ISP32**

---
## Power
<!--
- LDO (Low-dropout) Regulator
- Switching Mode Power Supply
-->
The power efficiency can be calculate by
$$
\eta = \frac{P_{output}}{P_{input}}
$$
----
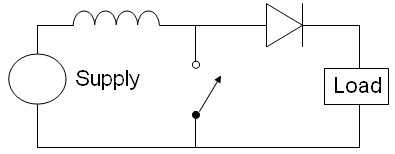
## Failure Power Circuit #1

----
## Failure Power Circuit #2

<!--
### LDO Regulator
- Low noise but low current
- Compact

### Switching Mode Power Supply
- High efficiency
- Can cause electrical noise
-->
---
## MCU
A **m**i**c**rocontroller **u**nit is a cheap and minimal size computer.
Its main purpose is to collect data from various sensors and make the decision (open parachute, communicate with ground station, etc.)
----
## MCU Price
Very very very cheap compare to CPU

----
<!--
### Different architecture
- 8051
- PIC
- AVR
- ARM
- Xtensa
- RISCV
### Sensor Fusion - **Kalman Filter**
Produces estimates of unknown variables that tend to be more accurate than those based on a single measurement alone.

-->
---
## Sensor
{%youtube mfQjG4t4M08 %}
----
## Sensor

- Accelerometer, Gyroscope, Magnetic sensor
- Barometer
- GPS
----
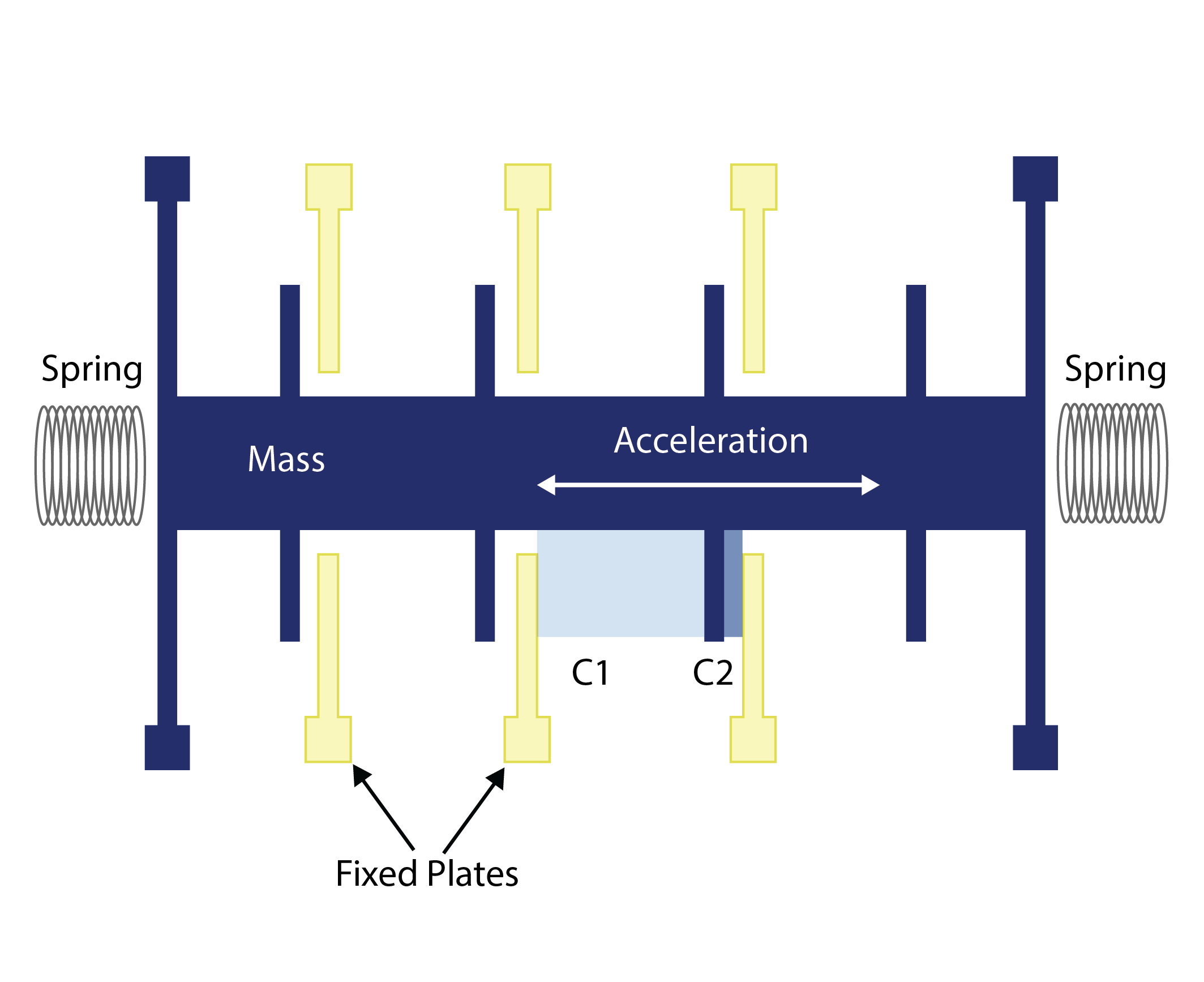
### Accelerometer
An accelerometer measures **acceleration**, which indicates how fast velocity is changing.
----
----
### Gyroscope
For measuring or maintaining **orientation** and **angular velocity**.
----

----
### Barometer
A barometer is a scientific instrument that is used to measure air pressure

----
### Pressure-Altitude Conversion

----
### Pressure-Altitude Conversion
$$
P = P_0e^{\frac{-gMh}{RT}}
$$
**$P$**: Pressure
**$P_0$**: Pressure at sea level
**$h$**: Altitude
**$T$**: Temperature
$R$: Gas constant
$g$: Gravitational acceleration
$M$: Molar mass of air
----
### GPS
Global Positioning System
----
### Triangulation

---
## Actuator
Is responsible for moving and controlling a mechanism or system.
e.g. **Servo Motor** ,**(BL)DC Motor**, **Light Indicator**
----
### Servo Motor - Parachute

----
### BLDC Motor - Reaction Wheel

----
### BLDC Motor - Reaction Wheel
[Video](
https://www.facebook.com/ispncku/posts/pfbid02EDsBk6zJK9fbFwseiYfVm2cuMiHPsdC4aHNeQoWRyK9wMzAp47D7fPZTQYg1jwPMl)
---
## Communication Protocol
- Wire Transmission
- Radio Transmission
<!--
#### Wire Transmission
- **Sync**hronous serial communication: SPI, I2C
- **Async**hronous serial communication: UART, USB
#### Sync Protocol
Sync protocols require that the clocks in the transmitting and receiving devices are synchronized.

#### Async Protocol
The data stream **contains synchronization information in form of start and stop signals**.

-->
----
### Radio Transmission
- High-speed communication like real-time video streaming are using **WiFi (2.4GHz)** and **5.8GHz**.
- Low-speed data streaming communicate via **LoRa (433MHz)**.
---
## Low cost avionics board **ISP555**
A low-cost board base on 555 timer IC.

----
## **ISP555** Features
- 9V battery input.
- Two timers for ignition and parachute/servo.
- Take-off decetor.
- LED indicator.
- No sensors or communication functionality.
----
## **ISP555** Introduction
There are 3 potentiometers on board.
- **CntDown** for the ignition count-down timer.
- **Chute** for the parachute after launcing.
- **Servo** inidcate the servo motor angle.
----
## **ISP555** Introduction
- **TKOFF**: Take-off detection
- **RBF** : Remove Before Flight
---
### If you're instrested in Programming/Electrionics
More information on Github **https://github.con/NCKU-ISP**
and Our Website **https://nckuisp.space**
{"metaMigratedAt":"2023-06-17T20:09:06.600Z","metaMigratedFrom":"YAML","title":"Avionics 基礎課程","breaks":true,"image":"https://i.imgflip.com/fv62s.jpg","slideOptions":"{\"theme\":\"night\",\"transition\":\"fade\",\"spotlight\":{\"enabled\":false},\"slideNumber\":true}","contributors":"[{\"id\":\"659807f0-da75-4faf-b7f7-1f50ca9f67e3\",\"add\":9160,\"del\":3285}]"}