## 簡介: 如果結構是為機台創造身軀,那配電就是在賦予機台生命 ## 課程一:各部件配置 ### step1: 組裝開關&PDP介紹   1. 先用電源線接頭將電線與接頭壓接固定 2. 將電線用M6螺絲與墊片固定 3. 最後將保護板裝上 ### step2: 保險絲介紹 在FRC的保險絲有分為三種 分別為20AMP、30AMP、40AMP 20AMP:燈號  30AMP:其他小馬達 40AMP:馬達控制器  ### step3: 安裝保險絲 1. 選擇適合的保險絲 2. 以電源線為上方並讓文字擺正,將其插入PDP中 ## 課程二: 網路訊號配置 ### roboRIO的介紹  ### step1: 將VRM、roboRIO連接PDP 1. 將電線剝皮,使銅線露出或使用Ferrules的壓接接頭將電線壓接 2. 分別用一字起將白色按鈕壓下,放入電線  ### step2: 安裝訊號線(杜邦線) 1. 將電線剝皮,使銅線露出或使用Ferrules的壓接接頭將電線壓接 2. 找到對應的孔,分別用一字起子將白色按鈕壓下,放入電線 3. CAN線是串連起來的,由roboRIO連接到馬達控制器上,再連接到VRM上,最後接回PDP ### step3: 網路機(WIFI機) 1. 提供機器人網路通訊 2. 可連接至筆記型電腦 3. 橘色網路線接到WIFI機的孔,另一端接到連接一般網路線 4. 橘色供電線要接到VRM的12v/2A的輸出口  ### step4: 燈號判別 1.STAT 和COMM會閃同樣的燈號  | 燈號顏色|解釋| | -------- | -------- | | 快閃綠色 | 機器人以連線且可以操控 | | 慢閃綠色 | 機器人以連線待命中 | | 閃橘燈 | 機器人有連線但發生錯誤| | 閃紅燈 | 沒有連接訊號線 | | 沒亮 | 沒有電源 | ## 課程三: PWM線路配置 ### step1-1: VRM介紹  1. 相對應的電子硬體要供應相對應的電流、電壓 2. 電源供應要接到PDP的20AMP 3. 使用Ferrules接頭電線壓接或將剝皮後的銅線插入 ### step1-2: 燈號判別 | 燈號顏色|解釋| | -------- | -------- | | 12V、5V亮 | 通電 | | 12V、5V暗 | 斷電 | ### **注意事項** VRM上沒有任何保險措施,所以在開電前務必先檢查是否接到正確的電壓及電流,以免導致其他裝置損壞 馬達控制器(SRX) ### step2-1: 馬達控制器概要 SRX是馬達控制器,可以控制一些比較基礎的馬達是775pro或是CIM馬達,因為這些馬達沒有自帶內建訊號,所以需要靠馬達控制器來控制他們,另外如果要使用encoder來記錄轉動圈數,也是會連接到Talon SRX。 ### step2-2: 各馬達控制器種類 & 連接方式 1. VICTOR  1.馬達要接白、綠色的線;PDP要接紅、黑色的線 2.如果要用壓接接頭,請使用安德森接頭或10~12AWG接頭 2. Talon  1.馬達要接白、綠色的線;PDP要接紅、黑色的線 2.如果要用壓接接頭,請使用安德森接頭或10~12AWG接頭 3. Spark Max  1.馬達要接A跟B;PDP要接正極跟負極 2.如果要用壓接接頭,請使用安德森接頭或10~12AWG接頭 **備註:這三種馬達控制器基本上功能都一樣,但Spark Max多了與Neo連接的功能,其餘馬達控制器連接NEO無法使其有正常功能** ### step2-3: PWM線路配置(不含氣動系統) 概念: 1. PDP先連至VRM 2. 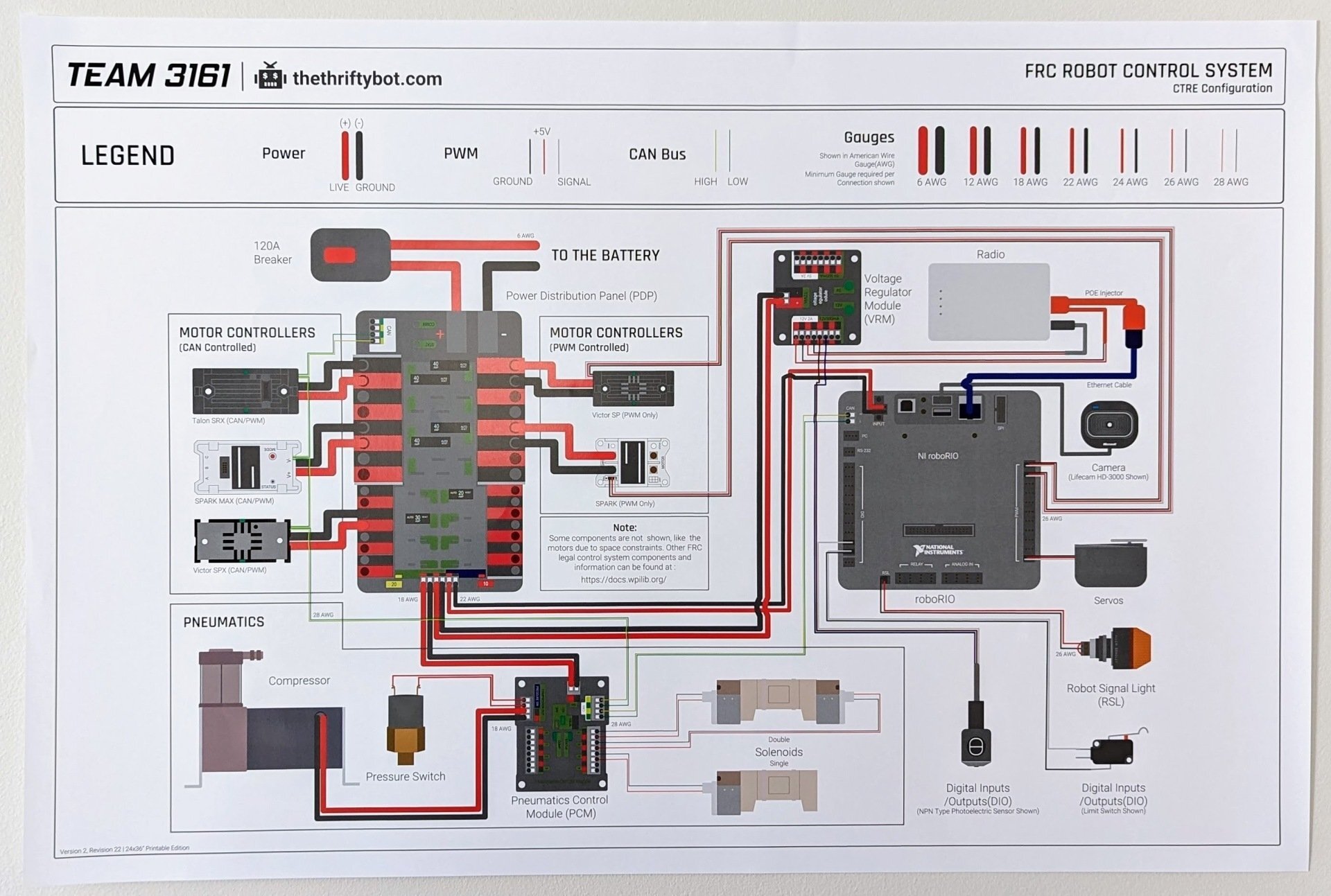 ### step2-4: 顯示燈號 1. status | 顏色 | 解釋 | | -------- | -------- | | 沒亮 | 沒有供電 | | 綠燈 | 正常運作 | | 橘燈 | 待機狀態 | | 紅燈 | 沒有偵測到訊號線 | 2. 即停(B/C) | 顏色 | 解釋 | | -------- | -------- | | 沒亮 | 滑行模式 | | 紅燈 | 即停模式 | ## 課程四: CAN線路配置&PCM氣壓系統 ### 一、概要 PCM是一個控制機器人氣動系統的裝置,包括控制空壓機打氣、電磁閥開關等是機台重要的系統之一。  ### 二、PCM基礎配電  ### 三、PCM電源與訊號線 1. 將接頭與配電盤連接(PDP的20AMP) 2. 訊號線與其他馬達控制器串聯 ### 四、電磁閥  1. 電池有分12V和24V,配上PCM時請注意是否符合其電壓 2. 電磁閥的訊號線不得與一般訊號線(CAN)線串聯,其應該要接上相對應的訊號孔才行 ### 五、洩壓閥  1. 由三個部分組成保險裝置、氣壓表、洩壓閥(由左至右) 2. 安裝順序一定要依照此順序擺放 ### 六、空壓機  1. 空壓機電源線要在頭尾套上熱縮套管來保護電線 2. 空壓機要接上三向頭後在接上M6螺絲或是1/4螺絲與墊片鎖好 3. 所有氣動的連結點都必須用止洩帶捆好並用板手鎖緊 ### 七、調壓閥  1. 機器人有規定的壓力限制,所以我們需要調壓閥來幫我們調整氣瓶內壓力 2. 調壓閥要調整時必須拉開調整扭,旋轉後調整好後要把旋轉扭壓進去固定 ### 八、燈號 1. Compressor LED | 燈號顏色|解釋| | -------- | -------- | | 綠燈 | 正常運作 | | 紅燈 | 偵測錯誤 | 2. Status LED | 顏色 | 狀態 |解釋 | | -------- | -------- | -------- | | 紅 | 固定 | 空壓機故障 | | 紅 | 閃爍 | 空壓機異常或CAN線異常或電池閥訊號線異常 | | 黃 | 閃爍 | 偵測錯誤 | | 綠 | 慢閃 | 待機中 | | 綠 | 快閃 | 正常運作 | 3. Robot Signal Light | 燈號 | 解釋 | | -------- | -------- | | 長亮 | 機器人待機中 | | 閃爍 | 機器人連線正常運作 | | 沒亮 | 機器人關機 |  ## 課程七:配電&機臺運行安全事項  ### 一、電源供應 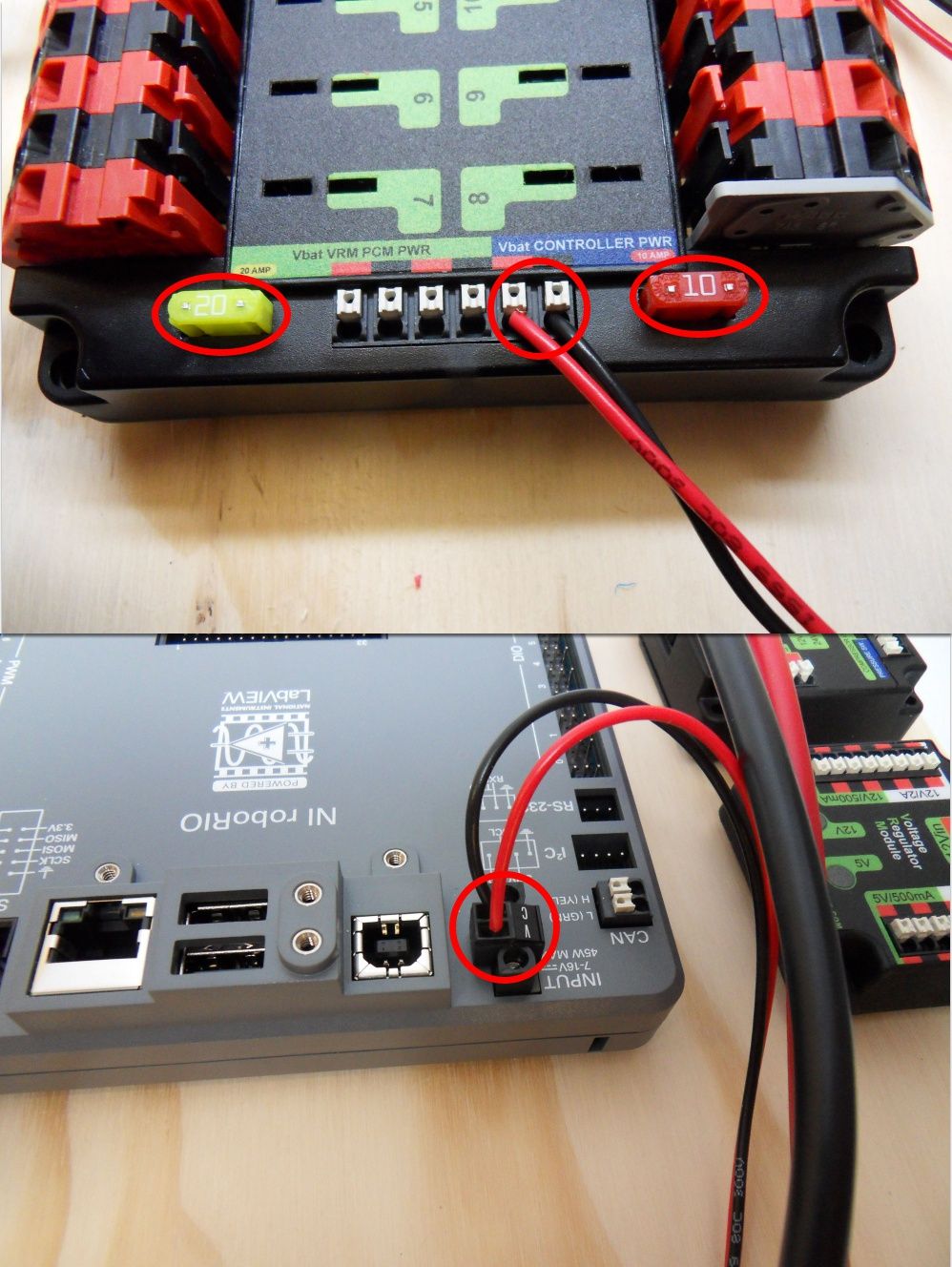 1. 機器人電池供電為12V/18A 2. 在連接到電池上時要將螺絲與螺帽鎖緊並纏上電火布 3. 連接電池時要將安德森與開關上的安德森接好 4. 使用一字起子等工具將配電盤撥片打開、拆解固定束帶時,需注意其尖銳處,必免受傷 5. VRM的電源供應處為20A,若電線安裝錯誤會使其有燒壞風險 6. 若電線塑膠包膜過長可用撥線鉗撥掉少許,方便電線安裝 7. VRM電源供應要接到PDP的20AMP 8. 電池引線在壓接後須套上熱縮套管 9. 電線正極為紅色,負極或地線為黑色 10. roboRIO通過輸入電源端口連接到PDP,勿將roboRIO直接連接到機器人電池 11. PDP總電源接線用M6螺絲與彈簧墊片鎖住固定 ### 二、訊號線連接 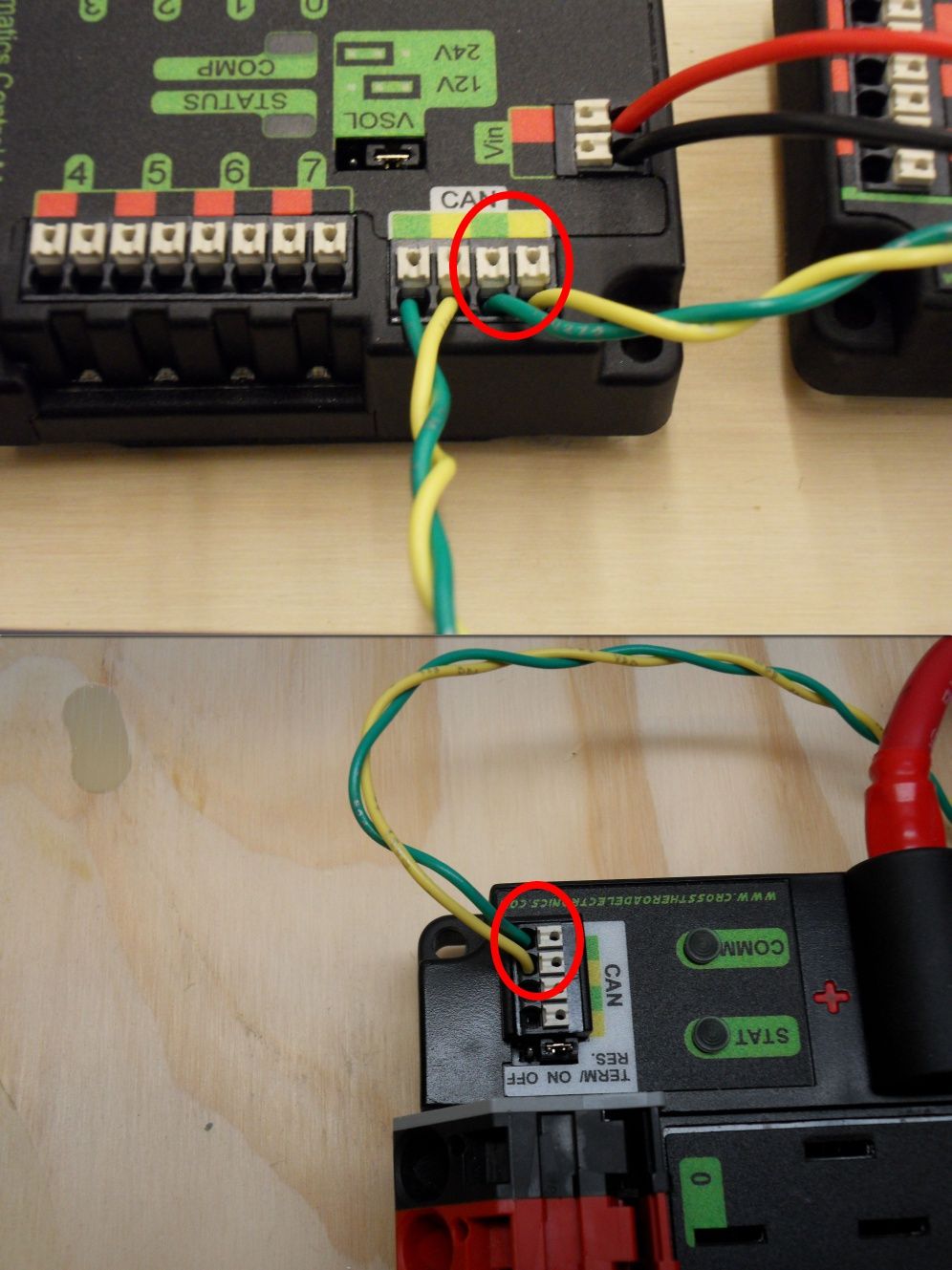 1. 將負極(黑色)電線插入N孔並壓緊 2. 剝去18AWG的皮並插入La孔 3. 剝去18AWG的另一端並插入Lb孔 4. 將電線正極插入Lb的孔中並壓緊 5. 將電線另一端插入roboRIO的RSL孔,紅色應接標註為S的孔 6. 機器人上最重要的一顆指示燈,要安裝機台清晰可見處 7. 連接到roboRIO,與roboRIO上RSL燈號相同 8. PCM要接訊號線才能正常運作,使用Ferrules的壓接接頭 9. 電磁閥的訊號線不得與一般訊號線(CAN)線串聯,得要接上相對應的訊號孔 10. CAN線是串連起來的,由roboRIO連接到馬達控制器上,再連接到PCM上,最後接回PDP ### 三、配電過程注意事項  1. 配電時先檢查各部件、零件是否有表面毀損、規格不符問題,避免使用到有問題的零件、部件 2. PDP有連接馬達控制器處,務必安裝保險絲 3. PCM要接上洩壓閥,以免氣壓太大以及要確認電磁閥是使用12v還是24v,接上相對應的跨接器 4. 機臺規章內有規定的壓力限制,因此需要調壓閥來調整氣瓶內壓力,避面壓力過高導致意外 5. 空壓機電源線要在頭尾套上熱縮套管來保護其電線 6. CAN線黃色是high、綠色是low,分別接入相對應的顏色的接口 7. 氣動系統的連結點都必須用止洩帶捆好並用板手鎖緊 8. 調壓閥調整時須拉開調整扭,旋轉調整好後要把旋轉扭壓進去固定 9. 保險絲使用時將其插入相對應的孔位,不同電子用品用的是不同保險絲 10. 杜邦線連接處易鬆脫,可用電火布/熱熔膠、熱縮套包裹固定,熱熔膠使用是要注意其高溫 ### 四、機台運行前後應檢查事項 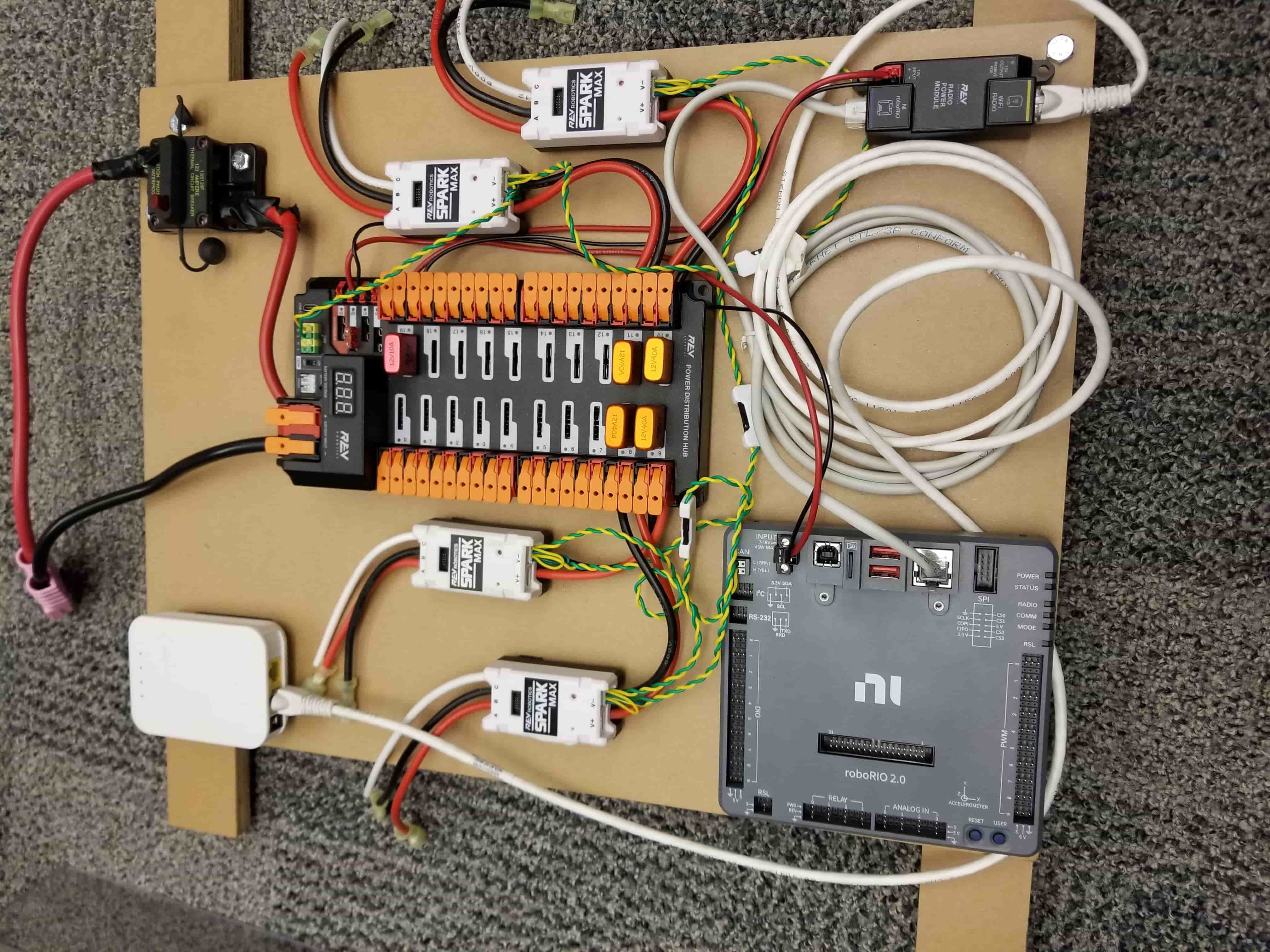 1. 電線插好在連接處後,須進行電線試拉動作,以免連接不良/漏電 2. 配電完成後須檢查電線連接處有無裸線狀況 3. 發現可用斜口鉗將該處電線的過長銅線剪去少許/包裹 電火布、熱縮套,避免電線走火、漏電、短路 4. 不要長時間測試氣動,Compressor可能會過熱,會因高溫而有多重意外風險 5. 若機臺運行時出現怪異聲響,要馬上將機臺disable並立即切掉電源,避免意外發生 6. 測試機臺時需要有人在一旁確認,緊急時才有人將機臺disable 7. 各處電線、杜邦線皆有固定連接方式,配電完成後得檢查有無裝反、錯位情形 8. 機臺通電狀態下,禁止進行配電動作/離機臺過近,有觸電、遭追撞、其它意外風險 9. 若馬達控制器、roborio 、PDP 等任一部件出現異常燈號,須儘速確認其狀況 10. VRM上沒有任何保險措施,通電前務必檢查是否接到正確的電壓及電流,以免導致其他裝置損壞 ### END 
×
Sign in
Email
Password
Forgot password
or
Sign in via Google
Sign in via Facebook
Sign in via X(Twitter)
Sign in via GitHub
Sign in via Dropbox
Sign in with Wallet
Wallet (
)
Connect another wallet
Continue with a different method
New to HackMD?
Sign up
By signing in, you agree to our
terms of service
.