# MADCHILLER's EmuFlight baseline tuning:
* Tune from these baselines.
### RoLL: STOCK - 50, 70, 28
1) 29, 20, 16
2) 34, 20, 19
3) 39, 20, 22
4) 45, 20, 25
5) 50, 20, 28
6) 55, 20, 31 - start watching motor heat
7) 61, 20, 34 - start watching motor heat
### PITCH: STOCK - 58, 70, 30
1) 35, 20, 18
2) 41, 20, 21
3) 46, 20, 24
4) 52, 20, 27
5) 58, 20, 30
6) 64, 20, 33 - start watching motor heat
7) 70, 20, 36 - start watching motor heat
### YAW: STOCK - 60, 70, 5
1) 20, 20, 5
2) 30, 20, 5
3) 40, 20, 5
4) 50, 20, 5
5) 60, 20, 5
6) 70, 20, 5 - watching for heat or Oscillation
7) 80, 20, 5 - watching for heat or Oscillation
8) 90, 20, 5 - watching for heat or Oscillation
### Notes
* Always be checking motor heat and watching/listening for oscillations.
* For yaw, test 8 ... leave Pitch and roll at 7) values
* 8 x 15-20 seconds flight tests.. _ALSO watch your LIPO voltage.. dont let is sag.. Change packs as needed.
* find the set that bring step-response closest to 1.0 (PIDToolbox)
* Then raise D as needed.
* Upon find a good P/D balance, use the ratio calculator to raise or lower PIDs: https://www.calculatorsoup.com/calculators/math/ratios.php
* Finally tune I as needed.
### Example Graphs
[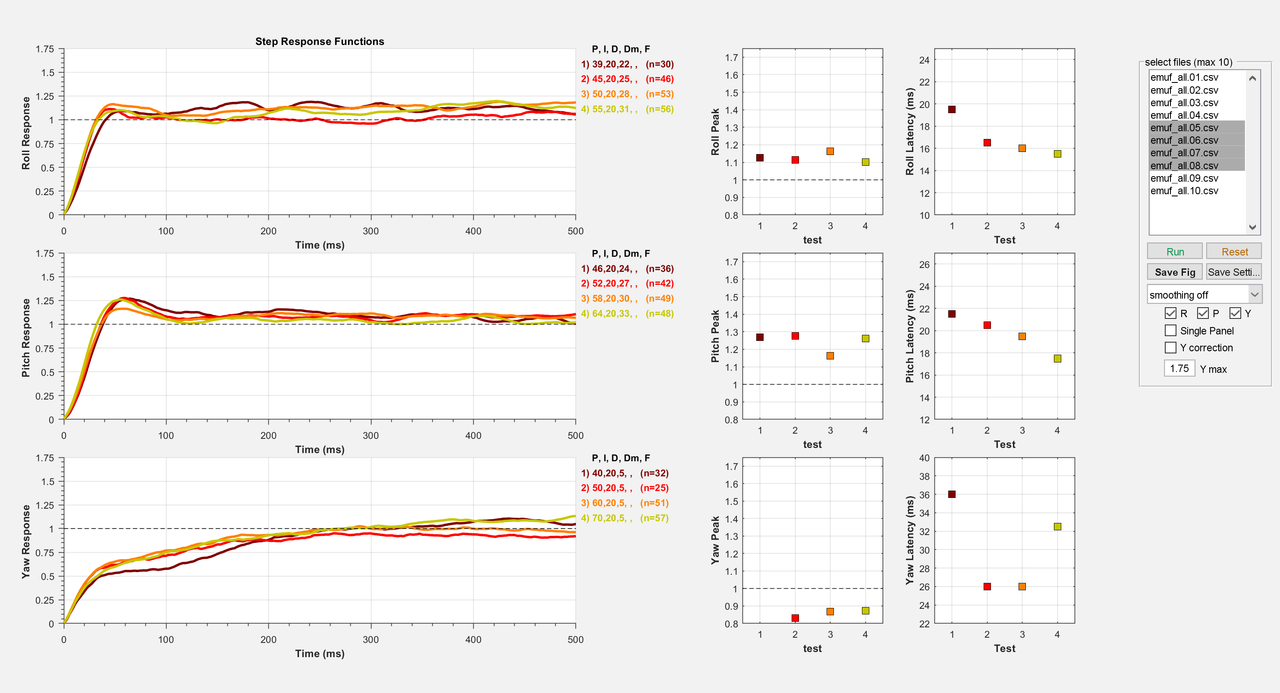](https://postimg.cc/rDYc6zBG)
* Find the closest to 1.0 (each axis separately), then tune D, then tune I.
 Sign in with Wallet
Connect another wallet
Sign in with Wallet
Connect another wallet