# Santolan, Pasig Great Mapping Quest
## Overview
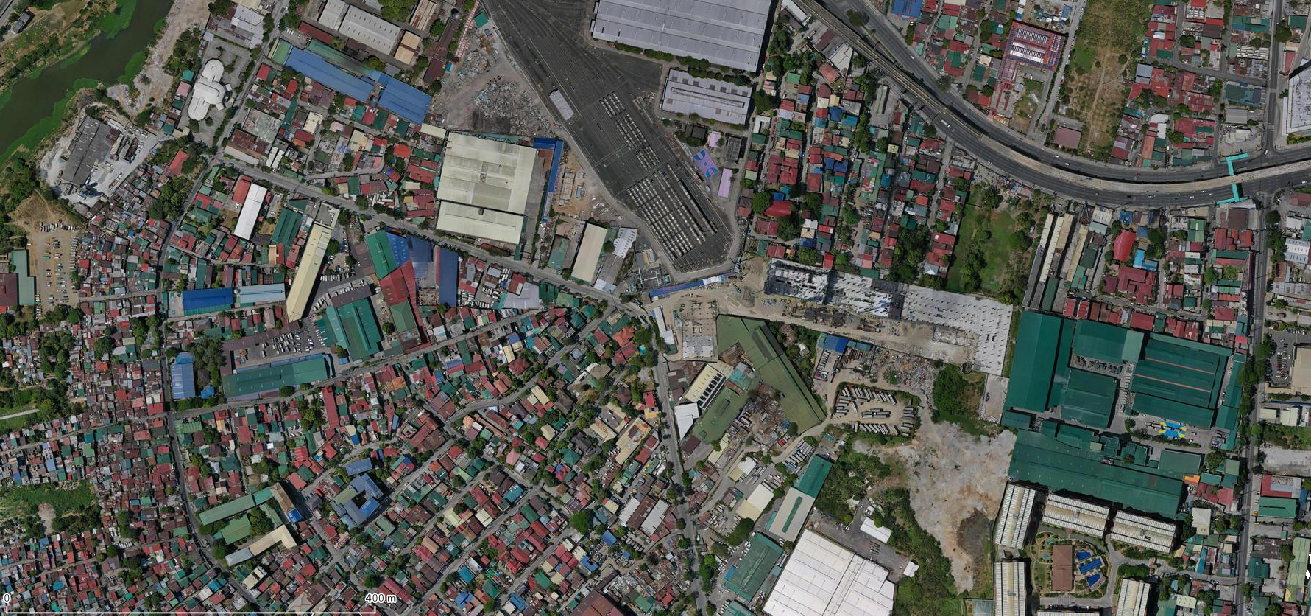
[Aero360](https://aero360intl.com/) deployed drone imagery collection for [Barangay Santolan, Pasig](https://www.openstreetmap.org/relation/1155961) to help in the community based covd19 response for the period of late March to W1 April 2020. These imagery are available in OpenAerialMap for everyone to use. Shout out to Sorbi! :man-bowing:
This document tracks my mapping progress to improve the data within this village using this imagery.
To view imagery in your OSM editor click the links: **[iD](https://www.openstreetmap.org/login?referer=%2Fedit%3Feditor%3Did#map=12/14.6186285/121.08694574999998&background=custom%3Ahttps%3A%2F%2Ftiles.openaerialmap.org%2F5ebaa03e80832d00073367ad%2F0%2F5ebaa03e80832d00073367b1%2F%7Bz%7D%2F%7Bx%7D%2F%7By%7D)**, **[JOSM]()**
Project date start: *2020-05-13*
## Tasks
- [x] [Assess imagery quality](#Imagery-quality) - 2020-05-13
- [ ] Cut a PR to include this imagery as default in iD/JOSM
- [ ] Roads
- [x] alignment - 2020-05-14
- [x] [lane](https://wiki.openstreetmap.org/wiki/Lanes) count (major only) - 2020-05-14
- [ ] 🚧 review highway classes
- [ ] 🚧 Buildings (maproulette [challenge](https://maproulette.org/browse/challenges/13450))
- [ ] alignment
- [ ] type
- [ ] height
- [ ] elev
- [ ] POIs and addresses
- [ ] alignment to rooftop/entrance
- [ ] Landuse
## Imagery quality
### Basic information
- resolution - 5 centimeters
- date of imagery - March-April 2020
- imagery alignment - 90% of the time is within <5 meters (see review below)
- source - [OpenAerialMap](https://map.openaerialmap.org/#/121.08851909637451,14.607546501180254,14/square/1323031202233233?resolution=high&_k=39sboh)
- drone - DJI Mavic Pro
### Alignment review
To measure the alignment quality we selected at least 100 road intersections from OSM as baseline reference point. These junctions have been continously adjusted in the past based on imagery and recorded GPS traces. As a local mapper I am fully aware of the quality of these intersections.
We measured the distance between these reference points to the intersection in the imagery and compute summary statistics.
#### Results
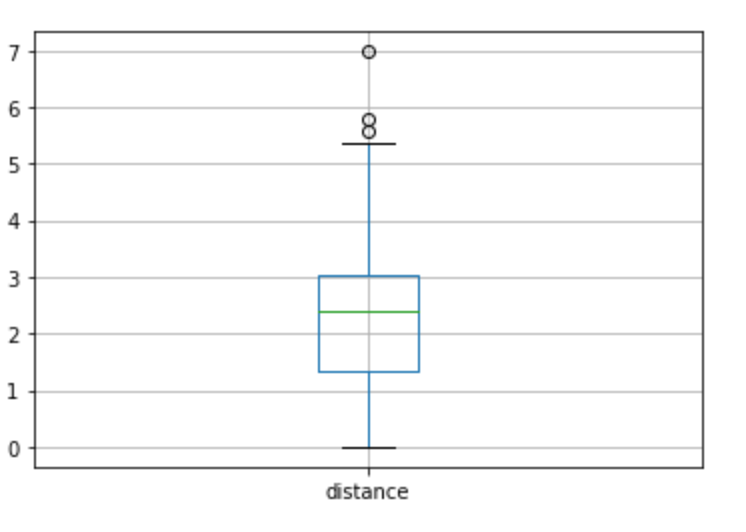
The distance between the imagery from the 138 road intersections evaluated was **within 5 meters 90% of the time**. This means the relative accuracy is within acceptable limit for mapping in OSM. 5 meters is the average width of a single lane in a highway. Based on this evaluation, the imagery **do not require any offset adjustment in the OSM editors.**
| | Distance (meters)
---|---
|count| 138
|mean| 2.294739
|median|2.400462
|std|1.419124
|min|0.000000
|25%|1.328797
|50%|2.400462
|75%|3.032681
|90%|4.115452
|max|6.980862
Histogram | Boxplot
---|---
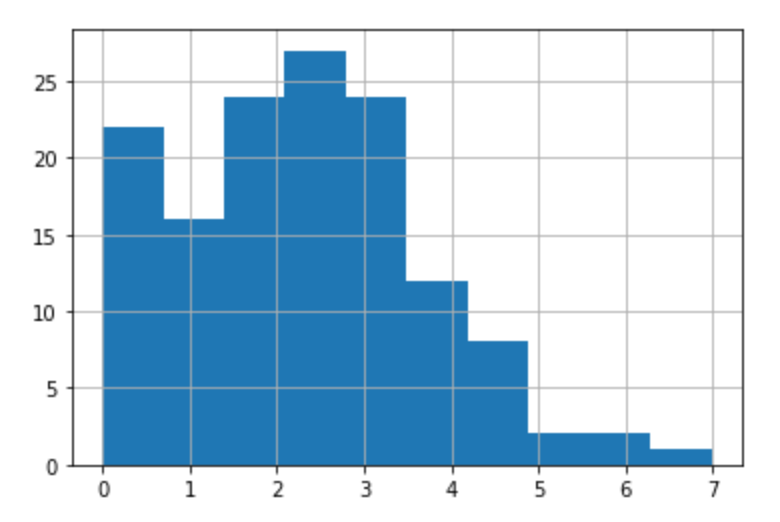 | 
Examples of intersection measurements (Magenta - OSM, Cyan - Imagery)
Santolan main | Calumpang/Dona Juana 3
---|---
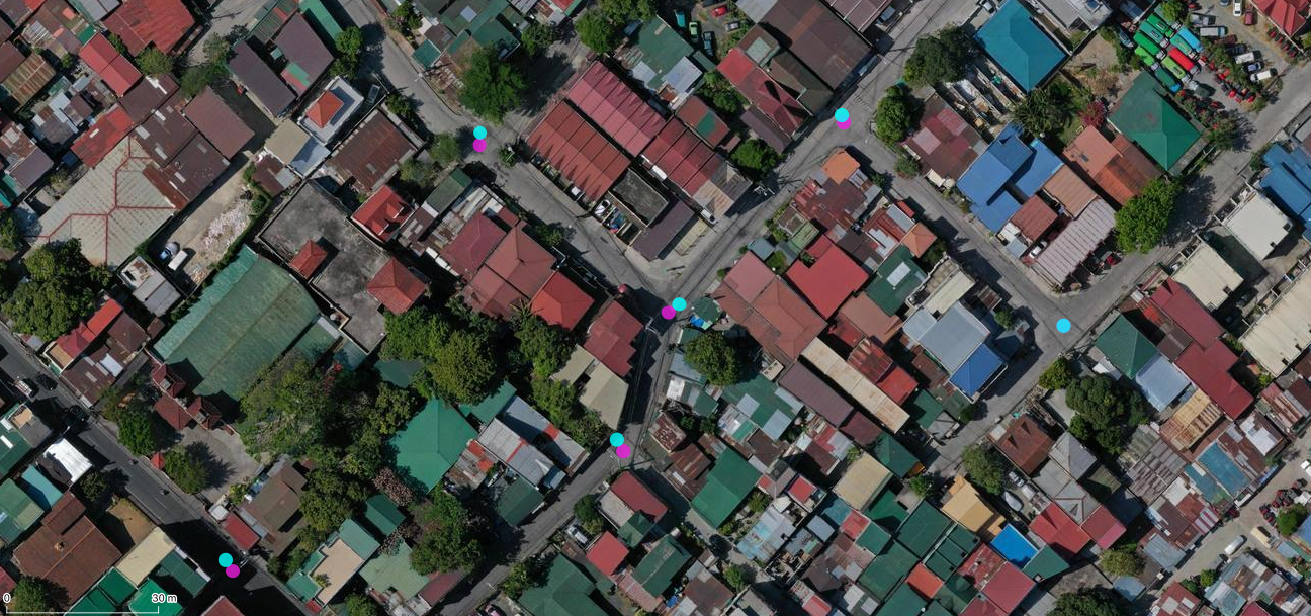 | 
#### Process
- Download road intersections from OSM from [overpass](https://stackoverflow.com/questions/12965090/get-list-of-all-intersections-in-a-city/18385182#18385182).
<details>
<summary>Show overpass query</summary>
```
<query type="way" into="hw">
<has-kv k="highway"/>
<has-kv k="highway" modv="not" regv="footway|cycleway|path|service|track"/>
<bbox-query {{bbox}}/>
</query>
<foreach from="hw" into="w">
<recurse from="w" type="way-node" into="ns"/>
<recurse from="ns" type="node-way" into="w2"/>
<query type="way" into="w2">
<item set="w2"/>
<has-kv k="highway"/>
<has-kv k="highway" modv="not" regv="footway|cycleway|path|service|track"/>
</query>
<difference into="wd">
<item set="w2"/>
<item set="w"/>
</difference>
<recurse from="wd" type="way-node" into="n2"/>
<recurse from="w" type="way-node" into="n3"/>
<query type="node">
<item set="n2"/>
<item set="n3"/>
</query>
<print/>
</foreach>
```
</details>
- For each intersection, mark the expected location in the imagery.
- Compute distance between the OSM intersection and imagery intersection.