# Spaces (WIP)
> This is a WIP README for a new repo I'm creating based on gym.Spaces, but without Gym as a requirement.
Simple, Expressive Structural Interfaces in Python. 100% Backward-compatible with gym.spaces.
Spaces are used to specify the interface between algorithms and the environments or problems they can be applied to. They have played a key role in the standardization of RL research.
Here, push them further, and kick things up a notch.
## 100% Backward-Compatible with Gym
Spaces can be used anywhere a gym.Space is expected!
```python
# From this:
from gym.spaces import Box
# to this:
from spaces import Box
```
### Installation:
```console
$ pip install spaces
```
------
## Added Features:
### Torch / Jax-compatible Spaces
```python
>>> import torch
>>> input_space = Box(0, 1, shape=(4,), dtype=torch.float32, device="cuda")
>>> input_space.sample()
tensor([0.9674, 0.4693, 0.0800, 0.0476], device='cuda:0')
```
```python
>>> import jax.numpy as jnp
>>> input_space = Box(0, 1, shape=(4,), dtype=jnp.float32)
>>> input_space.sample()
DeviceArray([0.9653214 , 0.22515893, 0.63302994, 0.29638183], dtype=float32)
```
## Added Spaces
- ImageSpace!
```python
>>> image_batch = ImageSpace(0, 1, (32, 3, 256, 256), dtype=np.float64)
>>> image_batch
ImageSpace(0.0, 1.0, (32, 3, 256, 256), float64)
>>> image_batch.is_channels_first
True
>>> image_batch.batch_size
32
>>> image_batch.channels
3
>>> image_batch.height, image_batch.width
(256, 256)
```
- <details>
<summary>TypedDicts!</summary>
```python
>>> class VisionSpace(TypedDictSpace):
... x: Box = Box(0, 1, (4,), dtype=np.float64)
>>> s = VisionSpace()
>>> s
VisionSpace(x:Box(0.0, 1.0, (4,), float64))
>>> s.seed(123)
>>> s.sample()
{'x': array([0.70787616, 0.3698764 , 0.29010696, 0.10647454])}
```
</details>
- <details>
<summary>NamedTuples!</summary>
```python
>>> class DatasetItemSpace(NamedTupleSpace):
... x: Box = Box(0, 1, shape=(4,))
... y: Discrete = Discrete(10)
>>> s = DatasetItemSpace()
>>> s
DatasetItemSpace(x=Box(0.0, 1.0, (4,), float64), y=Discrete(10))
>>> s.seed(123)
>>> s.sample()
DatasetItem(x=array([0.70787616, 0.3698764 , 0.29010696, 0.10647454]), y=6)
```
</details>
### Filtering!
You can describe arbitrarily-specific spaces using predicates:
```python
>>> even_integers = Discrete(10).where(lambda n: n % 2 == 0)
>>> even_integers.sample()
6
```
```python
>>> unit_circle = Box(-1, 1, shape=(2,), dtype=np.float64, seed=123).where(
... lambda xy: (xy ** 2).sum() <= 1
...)
>>> np.array((0.1, 0.2)) in unit_circle
True
>>> np.array((1, 1)) in unit_circle
False
>>> unit_circle.sample()
array([ 0.36470373, -0.89235796])
>>> def hypersphere(radius: float, dimensions: int) -> FilteredSpace[np.ndarray]:
... return Box(-radius, +radius, shape=(dimensions,)).where(
... lambda v: v.pow(2).sum() <= radius**dimensions
... )
...
>>> unit_sphere = hypersphere(radius=1, dimensions=3)
```
### Spaces as first-class objects!
Spaces can be easily changed using additions, multiplications, divisions, etc:
```python
>>> from spaces import Box
>>> space = Box(0, 1)
>>> space + 1
Box(1, 2, shape=(), dtype=np.float32)
>>> space * 10
Box(0, 10, shape=(), dtype=np.float32)
>>> space + space
Box(0, 2, shape=(), dtype=np.float32)
```
Fancier operations, like multiplying or dividing two spaces together, will produce an output space that will perform the multiplication / division from each source space before returning the product!
```python
>>> from spaces import Box
>>> unit_uniforms = [Box(0, 1) for _ in range(5)]
>>> product_of_uniforms = np.product(unit_uniforms)
>>> product_of_uniforms
ProductSpace([
Box(0, 1),
...
Box(0, 1),
])
>>> product_of_uniforms.sample()
0.013806694
>>> product_of_uniforms.sample()
0.25681835
```
_**This means, it's also possible to pass a space through a neural network!**_
### **Envs** (<-- big deal!)
Now you can even specify directly the type of environments that your agents / models can be applied to!
```python
>>> Envs: Space[gym.Env]
>>> discrete_action_envs = Envs().where(lambda env: isinstance(env.action_space, Discrete))
>>> gym.make("CartPole-v1") in discrete_action_envs
True
>>> gym.make("Pendulum-v1") in discrete_action_envs
False
>>> discrete_action_envs.sample()
<TimeLimit<OrderEnforcing<MountainCarEnv<MountainCar-v0>>>>
```
### Datasets
```python
>>> from spaces import Datasets, Image, Discrete, Tuple
>>>
>>> dataset_space = Datasets(
... item=Tuple(Image(low=0, high=256, shape=(3, 32, 32)), Discrete(10)),
... length=lambda l: l < 10_000,
... )
>>> from torchvision.datasets import FakeData
... fake_dataset = FakeData(
... size=1000, image_size=(3, 32, 32), num_classes=10,
... )
>>> fake_dataset in dataset_space
True
>>> from torchvision.datasets import CIFAR10
>>> CIFAR10("data") in dataset_space
True
>>> from torchvision.datasets import MNIST
>>> MNIST("data") in dataset_space
False
```
### Unions!
```python
>>> odd_integers = Discrete().where(lambda n: n % 2 == 0)
>>> greater_than_5 = Discrete().where(lambda n: n > 5)
>>> union = odd_integers | greater_than_5
>>> union
UnionSpace([
Discrete(n=1000).where(lambda n: n % 2 == 0),
Discrete().where(lambda n: n > 5)
])
>>> union.sample()
3449325481
```
```python=
def union(space_a: Space[A], *other_spaces: Space[B]) -> Space[A | B]:
...
# TODO: For boxes, maybe we could just return Box(low=np.minimum(a.low, b.low), high=np.maximum(a.high, b.high)) ?
# However that isn't great if there are spots where they don't overlap! Maybe we could check for overlap before doing this?
# TODO: Given a bunch of Box spaces, compare the lowest of maximum and the highest minimum to check if there is a non-covered region?
```
### Transformations
This library comes with a buttload of transformation functions that can directly be applied to spaces, not just their values!
For instance:
```python
>>> from spaces import ImageSpace
>>> from spaces.transforms import channels_first
>>> image_space = spaces.ImageSpace(0, 256, (32, 32, 3), np.uint8)
>>> channels_first(image_space)
ImageSpace(0, 256, (3, 32, 32), dtype=np.uint8)
```
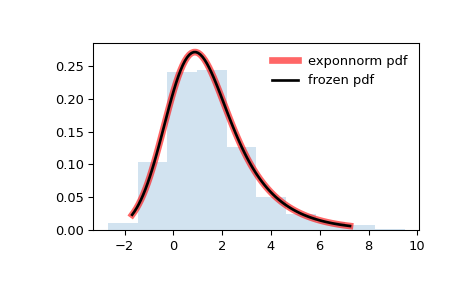
### Rich Priors
You can use much more than just uniform priors for your spaces!
A wide variety of priors can be used over a given space! It is for example possible to use any of the priors from [scipy distrubutions](https://docs.scipy.org/doc/scipy/reference/stats.html):
```python
>>> from scipy.stats import exponnorm
>>> space = Box(-np.inf, np.inf, prior=exponnorm)
>>> histogram = space.hist()
>>> histogram.show()
```
### Higher-Order spaces
Spaces of Spaces!
- Discretes: Space of Discrete spaces
- Boxes: Space of Box spaces
- Tuples: Space of Tuple spaces
- Dicts: Space of Dict Spaces
- Envs: Space of gym Environments
- Dataset: Space of Datasets
## Other ideas:
- Space of Functions? e.g. input space, output space?
 Sign in with Wallet
Connect another wallet
Sign in with Wallet
Connect another wallet