# ic
FLEXMOS Hex Low-side MOSFET Pre-driver [NCV7520](https://www.onsemi.com/pdf/datasheet/ncv7520-d.pdf) 可以看到有SPI 和 parallel pin(就連PWM)
看起來還是沒有那種輸入phase angle,直接output 對應svpwm。也是對,畢竟MCU能做,但就是有點怕SVPWM 計算耗費性能。
[Spining BLDC(Gimbal) motors at super slooooooow speeds with Arduino and L6234](http://www.berryjam.eu/2015/04/driving-bldc-gimbals-at-super-slow-speeds-with-arduino/)
和預期的一樣有driver,input 就3個pin腳。這IC主要是希望後面就直接接馬達了。但應該也可以當做前級就好。
[L6234 Three phase motor driver ](https://www.st.com/en/motor-drivers/l6234.html)

其實有,只是叫controller
[MP6570](https://www.monolithicpower.com/en/mp6570.html)
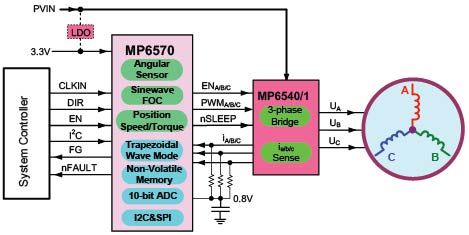
[MP6540](https://www.monolithicpower.com/en/mp6540-mp6540a.html) 也不錯,整合MOS 和 current OP。
* 比較像的還有 [DRV8313](https://www.ti.com/lit/ds/symlink/drv8313.pdf?ts=1691034208831&ref_url=https%253A%252F%252Fwww.google.com%252F),它的PGND1也是放resistance,但沒有放大器。 這個IC有模組,比較常見。
* analog device [TMC4671](https://media.digikey.com/pdf/Data%20Sheets/Trinamic%20Motion%20Control%20PDFs/TMC4671_v1.06.pdf): 這個就是SPI 介面,然後輸出SVPWM。但是又太多了,連PID controller,甚至torque mode, position control... 都做完了。但是可能也是不錯的方案,畢竟current loop用硬體做,保證realtime,省不少資源。其它loop再用算的。
* update rate of current controller and PWM at maximum frequency of 100 kHz
* 10us 的current loop,很吸引人
* 50RMB
* datasheet 裡面的資料很豐富且專業。
應該是如果只有算SVPWM的電路太浪費了,可以多做一點。
大部份的整體IC都是無介面,不接MCU。 MP6570, TMC4671這種的比較少。
往下一階 SPI Controlled H-Bridge ,L9958,也是有。但沒SVPWM 還用SPI沒意義。
# circuit

[NXP AN1590 HIGH VOLTAGE MEDIUM POWER BOARD FOR THREE PHASE MOTORS](https://www.nxp.com/docs/en/application-note/AN1590.pdf)
freescale detail design reference. good for knowing sensor and isolation design. basically, all signal will use divider resistor. And isolate OP for isolation. OP for low pass filter and signal amplifier.
* HCPL7800
* 光隔離放大器
* MC34082
* OP
* 我希望能offset。0~5V。
[Renesas Current and Voltage Sensing Solutions for Motor Drive Control Using Photocouplers](https://www.renesas.com/us/en/document/whp/current-and-voltage-sensing-solutions-motor-drive-control-using-photocouplers-0)
把 isolator, op, delta sigma AD modulator 整合。
ADC 有分 Delta Sigma, successive approximation register (SAR)
Delta Sigma Demodulator (DSD) 可以decode delta sigma signal, 可以整合進MCU
stm32f7 有 DFSDM
f28377d 有 Sigma Delta Filter Module (SDFM)
[A Simple ADC Comparison Matrix](https://www.analog.com/en/technical-articles/a-simple-adc-comparison-matrix.html)
DS DAC trade-off of speed to resolution compare to SAR DAC
# encoder
> 自己做了話,可以作廢不少,encoder 浪費太多時間和成本在介面。
[提升馬達控制編碼器的通訊可靠度與效能](https://www.eettaiwan.com/20180227ta31-enhanced-communication-reliability-and-performance-for-motor-control-encoder-applications/)
[绝对值编码器接口:SSI、BISS、Hiperface、EnDat之间的差异](https://zhuanlan.zhihu.com/p/650869976)
vendor specific protocol
endat2.2, tamagawa t-format, hiperface
沒有用sincos 的需要。
增量式都直接用ABZ,或是SPI (如果是磁頭)直接讀了。ABZ 如果沒有差分線,所以 vcc, gnd, shield, a,b,z,共6個。但如果有,就又不一樣。所以ABZ的接頭不太統一。
低階的,都是6pin 的版本。差分與否,就是看距離。如果是驅電一體,就不需要。總體來說,我認為驅電一體 > remote 驅動器。不然就用額外的 差分转集电极。
理論上,增量式也可以用SSI。但是有用到的幾乎都是絕對型。
~~總之,BISS 是第一選擇。~~
速度要多快?assume 10ms(100khz) rate,32bit encoder,就是3.2Mbps。如果要request response,就要x2-->6.4Mbps,再來如果有額外1個通道for other info,x2-->12.8Mbps。
目前由於encoder interface ic 的獨佔性,還沒有真正通用的abs encoder 方案。老舊,無軟體層協議的 **SSI** 可能反而是主流。新的挑戰者 Ethercat 沒有對應mcu 2 mcu ic,好像不太適合。CANopen FD可能更有機會,但是一開始就被速度限制上限了。還是說,biss-c 的fpga會先被做出來?
主流的encoder裡,**tamagawa** tformat 因為是usart,所以應該是最可得的。BiSS的應該是design算好的,但是master interface 直接卡死。
會不會說,最後mcu 還不如直接用ethernet udp protocol 走過來?
## SSI
[什麼是串行同步接口](https://knowledge.ni.com/KnowledgeArticleDetails?id=kA00Z0000019MgLSAU&l=zh-TW)
[SSI Encoders Overview](https://www.dynapar.com/technology/encoder_basics/ssi_encoders/)
SSI 本質上是一種硬體層的協定(e.g. SPI 位階),一般的使用就是 periodic 的output 。由於是硬體,所以output 的單位之類都不一定有規範,有1. gray code 2.abs encoder 的直接output。
速度 2Mhz 大概到頂。
SSI 還是有意義的,因為現在的encoder interface ic 大多只有獨佔的解決方案。
## BISS
[wiki BiSS interface](https://en.wikipedia.org/wiki/BiSS_interface)
> Because BiSS utilizes the PHY of SSI [(RS-422)], it develops as the successor of the SSI interface in automation
[BISS spec](https://biss-interface.com/c/downloads/)
BISS B 已經停用,目前都是2007年後的 BISS C。
Serial 系列的protocol 最大問題是很多時候沒有一個硬體直接定義的frame,或是data 要在那裡切分。這導致ISR 裡要有routine 去polling check buffer。
BISS 做的就比endat2.2 好,BISS 的clock signal 由主機切斷,但endat 會不斷持續,增加判斷data 的難度。
[ic-haus BiSS 接口]
[BISS通信协议简介](https://zhuanlan.zhihu.com/p/630372843)
BISS 有串連encoder , 数据同步 功能,同步對於很進階的進用有意義。
[MR2 BiSS編碼器外掛模組](https://www.gathertech.net/post/mr2-biss%E7%B7%A8%E7%A2%BC%E5%99%A8%E5%A4%96%E6%8E%9B%E6%A8%A1%E7%B5%84)
硬體介面和 SPI, usart 不同,導致大部份都用FPGA. 有部份ic,[ichaus](https://www.ichaus.de/products/?category=22240) iC-MB3 和 iC-MB4。NTD 250起。
我估計一般 FPGA的價格在 NT 150左右,超過150的ic 實在沒必要。
蠻貴的。沒有辦法用usart 做就沒意義了。
stm32的SPI 部份可以 [receive only mode](https://community.st.com/t5/stm32-mcus-products/biss-c-implementation/td-p/81200),但這也表示它只有部份功能。
slave open, master acutal close.
等 fpga open? [BISS-C](https://github.com/lenzencoders/BISS-C)
## tamagawa t-format
用的人也不少。
## endat
越來越封閉,變成有 要求才給decode 的 document
有考慮incremental encoder 的情況。
endat2.2 比 endat2.1 就是同時有 publish 的 data block 和 server/client 的 data block 在同一個frame。
有endat3了,和endat2.2完全不同,直接切成固定的request, response。更好。
[endat/c_src](https://github.com/thiagoesteves/endat/tree/master/c_src)
硬體介面和usart 不同,導致大部份都用FPGA
## tamagawa tformat
[多摩川编码器使用总结 ](https://github.com/imuncle/imuncle.github.io/issues/32)
是用RS485 (usart),算是最可得的。
max 2.5Mhz,算是比SSI 還高。以前usart 沒那麼彈性時,好像也要fpga。
## ethercat
CiA DS-406 是 encoder 的spec。但就是有點尷尬。ethercat 的design 是以 pc 為ethercat master, mcu 為 ethercat slave 為主。除了像 Ti sitara 特別強調可以 mcu 為 master 以外,或 [額外software](https://community.st.com/t5/stm32-mcus-embedded-software/run-ethercat-master-on-stm32h7-series/td-p/244332),幾乎沒有。
用ethercat encoder 了話,可以把速度再提上去,Serial 大概10M到頂,一舉x10 到100M。而且不用搞一堆特規的encoder 協定。網路線也非常成熟。
當然是可能有點over design了,因為 MCU 就只有要接encoder,如果要接很多額外的 peripheral 意義較大。